Actuators, Free Full-Text
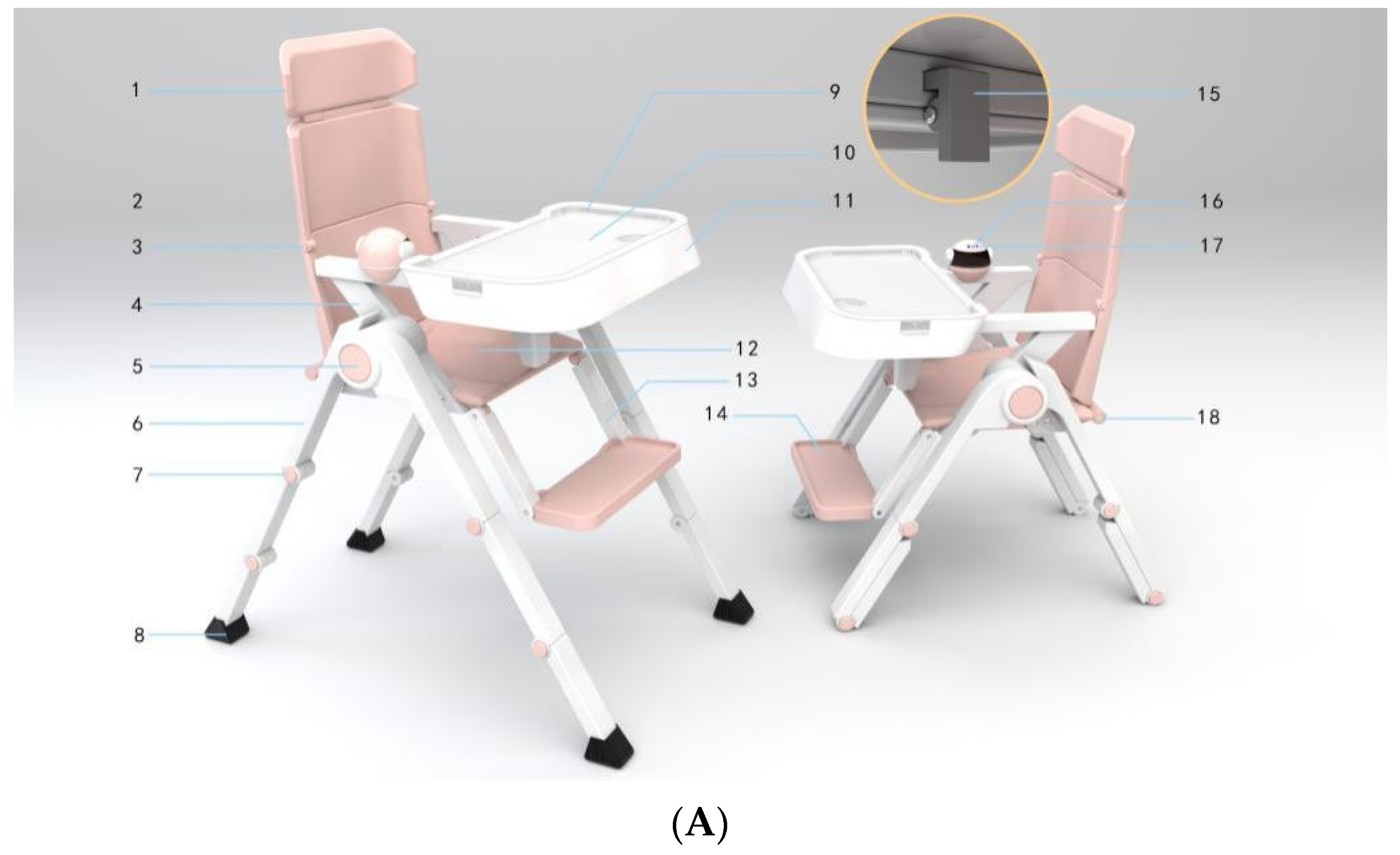
The design and control of baby chairs have attracted great interest due to children’s increasing consumption market. As a human-robot interface, the features of baby chairs, such as their flexibility, comfortableness, safety, etc., are important factors that should be considered. Therefore, in this paper, to provide competent assistance to parents in taking care of their children, we propose a novel design and control scheme for improving children’s living goods and easing parents’ burden. Firstly, a novel modularization design method is introduced to redesign the shape and structure of the baby chair to cater to multifunctional demands. Flexible materials are chosen to adapt to different body shapes for the sake of safety and comfortableness. Moreover, a Cartesian impedance controller enhanced by a radial basis function neural network (RBFNN) is proposed to achieve a safe, smooth and accurate control of the baby chair with children sitting on it in various uncertain situations using integrated actuators. Both target posture control and periodic control of the chair are implemented to meet different practical requirements. The feasibility of both the chair design and its control is verified in the MATLAB simulation environment through reference tracking tasks. The experimental results demonstrate that our controller can achieve satisfactory performance by controlling the position error in a reasonable range and keeping the manipulation stable and smooth. With the increasing demand for baby chairs in the global children’s consumption market, we believe that the methodology proposed in this paper will attract more research and industry interest.

Actuators in IoT - GeeksforGeeks

Programmable Morphing Hydrogels for Soft Actuators and Robots: From Structure Designs to Active Functions

Peano-HASEL actuators: Muscle-mimetic, electrohydraulic transducers that linearly contract on activation
PDF) Actuators and Sensors for Application in Agricultural Robots: A Review

Long Shape Memory Alloy Tendon-based Soft Robotic Actuators and Implementation as a Soft Gripper

PDF) Study of a pseudo-empirical model approach to characterize plasma actuators
Stretchable Materials for Robust Soft Actuators towards Assistive Wearable Devices

Actuator Explained? - RealPars

Aerospace, Free Full-Text